Table of Contents¶
An outline of all sections included in this SRS is recorded here for easy reference.
- Table of Contents
- Reference Material
- Table of Units
- Table of Symbols
- Abbreviations and Acronyms
- Introduction
- Purpose of Document
- Scope of Requirements
- Characteristics of Intended Reader
- Organization of Document
- General System Description
- System Context
- User Characteristics
- System Constraints
- Specific System Description
- Problem Description
- Terminology and Definitions
- Physical System Description
- Goal Statements
- Solution Characteristics Specification
- Assumptions
- Theoretical Models
- General Definitions
- Data Definitions
- Instance Models
- Data Constraints
- Properties of a Correct Solution
- Requirements
- Functional Requirements
- Non-Functional Requirements
- Traceability Matrices and Graphs
- Values of Auxiliary Constants
- References
Reference Material¶
This section records information for easy reference.
Table of Units¶
The unit system used throughout is SI (Système International d'Unités). In addition to the basic units, several derived units are also used. For each unit, the Table of Units lists the symbol, a description, and the SI name.
| Symbol | Description | SI Name |
|---|---|---|
| $kg$ | mass | kilogram |
| $m$ | length | metre |
| $N$ | force | newton |
| $rad$ | angle | radian |
| $s$ | time | second |
Table of Symbols¶
The symbols used in this document are summarized in the Table of Symbols along with their units. Throughout the document, symbols in bold will represent vectors, and scalars otherwise. The symbols are listed in alphabetical order. For vector quantities, the units shown are for each component of the vector.
| Symbol | Description | Units |
|---|---|---|
| $a_x1$ | Horizontal acceleration of the first object | $\frac{m}{s^2}$ |
| $a_x2$ | Horizontal acceleration of the second object | $\frac{m}{s^2}$ |
| $a_y1$ | Vertical acceleration of the first object | $\frac{m}{s^2}$ |
| $a_y2$ | Vertical acceleration of the second object | $\frac{m}{s^2}$ |
| $a(t)$ | Acceleration | $\frac{m}{s^2}$ |
| $F$ | Force | $N$ |
| $g$ | Magnitude of gravitational acceleration | $\frac{m}{s^2}$ |
| $g$ | Gravitational acceleration | $\frac{m}{s^2}$ |
| $î$ | Unit vector | -- |
| $L_1$ | Length of the first rod | $m$ |
| $L_2$ | Length of the second rod | $m$ |
| $m$ | Mass | $kg$ |
| $m_1$ | Mass of the first object | $kg$ |
| $m_2$ | Mass of the second object | $kg$ |
| $p_x1$ | Horizontal position of the first object | $m$ |
| $p_x2$ | Horizontal position of the second object | $m$ |
| $p_y1$ | Vertical position of the first object | $m$ |
| $p_y2$ | Vertical position of the second object | $m$ |
| $p(t)$ | Position | $m$ |
| $T$ | Tension | $N$ |
| $T_1$ | Tension of the first object | $N$ |
| $T_2$ | Tension of the second object | $N$ |
| $t$ | Time | $s$ |
| $theta$ | Dependent variables | $rad$ |
| $v_x1$ | Horizontal velocity of the first object | $\frac{m}{s}$ |
| $v_x2$ | Horizontal velocity of the second object | $\frac{m}{s}$ |
| $v_y1$ | Vertical velocity of the first object | $\frac{m}{s}$ |
| $v_y2$ | Vertical velocity of the second object | $\frac{m}{s}$ |
| $v(t)$ | Velocity | $\frac{m}{s}$ |
| $w_1$ | Angular velocity of the first object | $\frac{rad}{s}$ |
| $w_2$ | Angular velocity of the second object | $\frac{rad}{s}$ |
| $α_1$ | Angular acceleration of the first object | $\frac{rad}{s^2}$ |
| $α_2$ | Angular acceleration of the second object | $\frac{rad}{s^2}$ |
| $θ_1$ | Angle of the first rod | $rad$ |
| $θ_2$ | Angle of the second rod | $rad$ |
| $π$ | Ratio of circumference to diameter for any circle | -- |
Abbreviations and Acronyms¶
| Abbreviation | Full Form |
|---|---|
| 2D | Two-Dimensional |
| A | Assumption |
| DD | Data Definition |
| DblPend | Double Pendulum |
| GD | General Definition |
| GS | Goal Statement |
| IM | Instance Model |
| PS | Physical System Description |
| R | Requirement |
| RefBy | Referenced by |
| Refname | Reference Name |
| SRS | Software Requirements Specification |
| TM | Theoretical Model |
| Uncert. | Typical Uncertainty |
Introduction¶
A pendulum consists of mass attached to the end of a rod and its moving curve is highly sensitive to initial conditions. Therefore, it is useful to have a program to simulate the motion of the pendulum to exhibit its chaotic characteristics. The document describes the program called Double Pendulum , which is based on the original, manually created version of <a href="https://github.com/Zhang-Zhi-ZZ/CAS741Project/tree/master/Double%20Pendulum\">Double Pendulum.
The following section provides an overview of the Software Requirements Specification (SRS) for Double Pendulum. This section explains the purpose of this document, the scope of the requirements, the characteristics of the intended reader, and the organization of the document.
Purpose of Document¶
The primary purpose of this document is to record the requirements of DblPend. Goals, assumptions, theoretical models, definitions, and other model derivation information are specified, allowing the reader to fully understand and verify the purpose and scientific basis of DblPend. With the exception of system constraints, this SRS will remain abstract, describing what problem is being solved, but not how to solve it.
This document will be used as a starting point for subsequent development phases, including writing the design specification and the software verification and validation plan. The design document will show how the requirements are to be realized, including decisions on the numerical algorithms and programming environment. The verification and validation plan will show the steps that will be used to increase confidence in the software documentation and the implementation. Although the SRS fits in a series of documents that follow the so-called waterfall model, the actual development process is not constrained in any way. Even when the waterfall model is not followed, as Parnas and Clements point out parnasClements1986 , the most logical way to present the documentation is still to "fake" a rational design process.
Scope of Requirements¶
The scope of the requirements includes the analysis of a two-dimensional (2D) pendulum motion problem with various initial conditions.
Characteristics of Intended Reader¶
Reviewers of this documentation should have an understanding of undergraduate level 2 physics, undergraduate level 1 calculus, and ordinary differential equations. The users of DblPend can have a lower level of expertise, as explained in Sec:User Characteristics.
Organization of Document¶
The organization of this document follows the template for an SRS for scientific computing software proposed by koothoor2013 , smithLai2005 , smithEtAl2007 , and smithKoothoor2016 . The presentation follows the standard pattern of presenting goals, theories, definitions, and assumptions. For readers that would like a more bottom up approach, they can start reading the instance models and trace back to find any additional information they require.
The goal statements are refined to the theoretical models and the theoretical models to the instance models.
General System Description¶
This section provides general information about the system. It identifies the interfaces between the system and its environment, describes the user characteristics, and lists the system constraints.
System Context¶
Fig:sysCtxDiag shows the system context. A circle represents an entity external to the software, the user in this case. A rectangle represents the software system itself (DblPend). Arrows are used to show the data flow between the system and its environment.
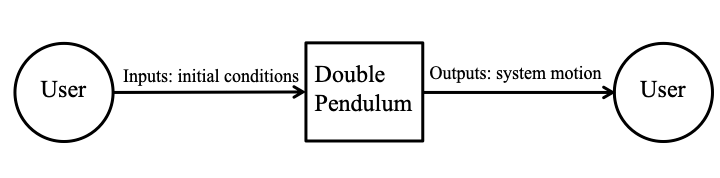
The interaction between the product and the user is through an application programming interface. The responsibilities of the user and the system are as follows:
- User Responsibilities
- Provide initial conditions of the physical state of the motion and the input data related to the Double Pendulum, ensuring no errors in the data entry.
- Ensure that consistent units are used for input variables.
- Ensure required software assumptions are appropriate for any particular problem input to the software.
- DblPend Responsibilities
- Detect data type mismatch, such as a string of characters input instead of a floating point number.
- Determine if the inputs satisfy the required physical and software constraints.
- Calculate the required outputs.
- Generate the required graphs.
User Characteristics¶
The end user of DblPend should have an understanding of high school physics, high school calculus and ordinary differential equations.
System Constraints¶
There are no system constraints.
Specific System Description¶
This section first presents the problem description, which gives a high-level view of the problem to be solved. This is followed by the solution characteristics specification, which presents the assumptions, theories, and definitions that are used.
Problem Description¶
A system is needed to predict the motion of a double pendulum.
Terminology and Definitions¶
This subsection provides a list of terms that are used in the subsequent sections and their meaning, with the purpose of reducing ambiguity and making it easier to correctly understand the requirements.
- Gravity: The force that attracts one physical body with mass to another.
- Cartesian coordinate system: A coordinate system that specifies each point uniquely in a plane by a set of numerical coordinates, which are the signed distances to the point from two fixed perpendicular oriented lines, measured in the same unit of length (from cartesianWiki ).
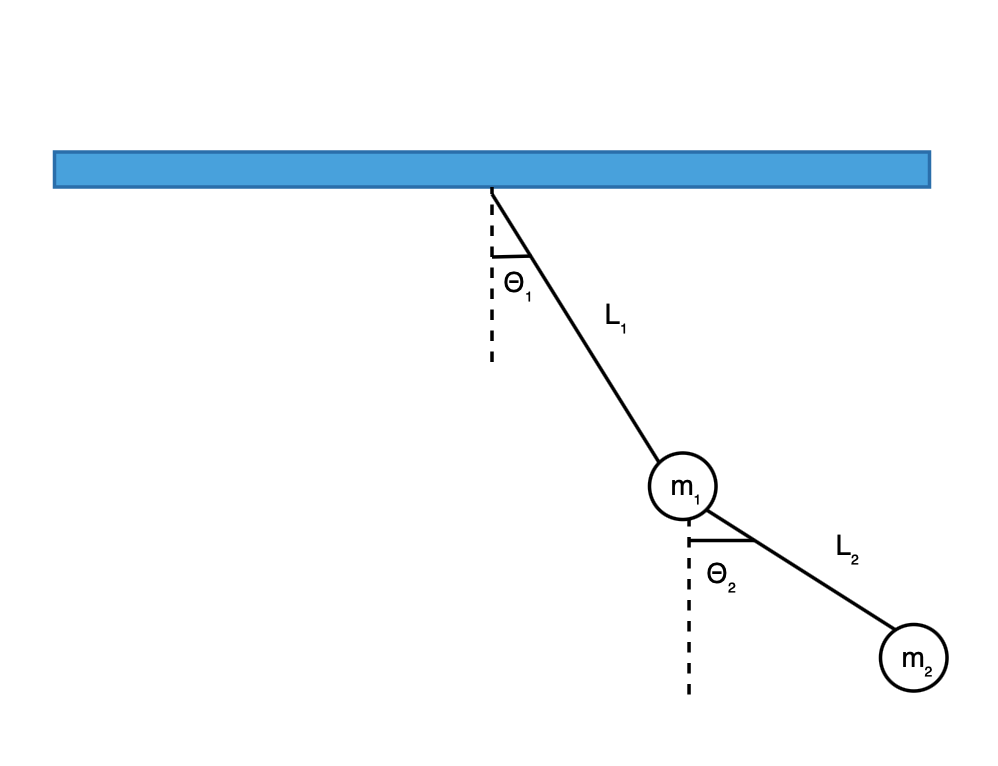
Physical System Description¶
The physical system of DblPend, as shown in Fig:dblpend, includes the following elements:
PS1: The first rod (with length of the first rod $L_1$).
PS2: The second rod (with length of the second rod $L_2$).
PS3: The first object.
PS4: The second object.
Goal Statements¶
Given the masses, length of the rods, initial angle of the masses and the gravitational constant, the goal statement is:
Solution Characteristics Specification¶
The instance models that govern DblPend are presented in the Instance Model Section. The information to understand the meaning of the instance models and their derivation is also presented, so that the instance models can be verified.
Assumptions¶
This section simplifies the original problem and helps in developing the theoretical models by filling in the missing information for the physical system. The assumptions refine the scope by providing more detail.
Theoretical Models¶
This section focuses on the general equations and laws that DblPend is based on.
| Refname | TM:acceleration |
|---|---|
| Label |
Acceleration |
| Equation | $$\symbf{a}\text{(}t\text{)}=\frac{\,d\symbf{v}\text{(}t\text{)}}{\,dt}$$ |
| Description |
|
| Source | |
| RefBy |
| Refname | TM:velocity |
|---|---|
| Label |
Velocity |
| Equation | $$\symbf{v}\text{(}t\text{)}=\frac{\,d\symbf{p}\text{(}t\text{)}}{\,dt}$$ |
| Description |
|
| Source | |
| RefBy |
| Refname | TM:NewtonSecLawMot |
|---|---|
| Label |
Newton's second law of motion |
| Equation | $$\symbf{F}=m\,\symbf{a}\text{(}t\text{)}$$ |
| Description |
|
| Notes |
The net force $F$ on a body is proportional to the acceleration $a(t)$ of the body, where $m$ denotes the mass of the body as the constant of proportionality. |
| Source |
-- |
| RefBy |
General Definitions¶
This section collects the laws and equations that will be used to build the instance models.
| Refname | GD:velocityX1 |
|---|---|
| Label |
The $x$-component of velocity of the first object |
| Units |
$\frac{m}{s}$ |
| Equation | $${v_{\text{x}1}}={w_{1}}\,{L_{1}}\,\cos\left({θ_{1}}\right)$$ |
| Description |
|
| Source |
-- |
| RefBy |
Detailed derivation of the $x$-component of velocity:¶
At a given point in time, velocity is defined in DD:positionGDD $$\symbf{v}\text{(}t\text{)}=\frac{\,d\symbf{p}\text{(}t\text{)}}{\,dt}$$
We also know the horizontal position that is defined in DD:positionXDD1 $${p_{\text{x}1}}={L_{1}}\,\sin\left({θ_{1}}\right)$$
Applying this, $${v_{\text{x}1}}=\frac{\,d{L_{1}}\,\sin\left({θ_{1}}\right)}{\,dt}$$
$L_1$ is constant with respect to time, so $${v_{\text{x}1}}={L_{1}}\,\frac{\,d\sin\left({θ_{1}}\right)}{\,dt}$$
Therefore, using the chain rule,
$${v_{\text{x}1}}={w_{1}}\,{L_{1}}\,\cos\left({θ_{1}}\right)$$
| Refname | GD:velocityY1 |
|---|---|
| Label |
The $y$-component of velocity of the first object |
| Units |
$\frac{m}{s}$ |
| Equation | $${v_{\text{y}1}}={w_{1}}\,{L_{1}}\,\sin\left({θ_{1}}\right)$$ |
| Description |
|
| Source |
-- |
| RefBy |
Detailed derivation of the $y$-component of velocity:¶
At a given point in time, velocity is defined in DD:positionGDD $$\symbf{v}\text{(}t\text{)}=\frac{\,d\symbf{p}\text{(}t\text{)}}{\,dt}$$
We also know the vertical position that is defined in DD:positionYDD1 $${p_{\text{y}1}}=-{L_{1}}\,\cos\left({θ_{1}}\right)$$
Applying this, $${v_{\text{y}1}}=-\left(\frac{\,d{L_{1}}\,\cos\left({θ_{1}}\right)}{\,dt}\right)$$
$L_1$ is constant with respect to time, so $${v_{\text{y}1}}=-{L_{1}}\,\frac{\,d\cos\left({θ_{1}}\right)}{\,dt}$$
Therefore, using the chain rule,
$${v_{\text{y}1}}={w_{1}}\,{L_{1}}\,\sin\left({θ_{1}}\right)$$
| Refname | GD:velocityX2 |
|---|---|
| Label |
The $x$-component of velocity of the second object |
| Units |
$\frac{m}{s}$ |
| Equation | $${v_{\text{x}2}}={v_{\text{x}1}}+{w_{2}}\,{L_{2}}\,\cos\left({θ_{2}}\right)$$ |
| Description |
|
| Source |
-- |
| RefBy |
Detailed derivation of the $x$-component of velocity:¶
At a given point in time, velocity is defined in DD:positionGDD $$\symbf{v}\text{(}t\text{)}=\frac{\,d\symbf{p}\text{(}t\text{)}}{\,dt}$$
We also know the horizontal position that is defined in DD:positionXDD2 $${p_{\text{x}2}}={p_{\text{x}1}}+{L_{2}}\,\sin\left({θ_{2}}\right)$$
Applying this, $${v_{\text{x}2}}=\frac{\,d{p_{\text{x}1}}+{L_{2}}\,\sin\left({θ_{2}}\right)}{\,dt}$$
$L_1$ is constant with respect to time, so
$${v_{\text{x}2}}={v_{\text{x}1}}+{w_{2}}\,{L_{2}}\,\cos\left({θ_{2}}\right)$$
| Refname | GD:velocityY2 |
|---|---|
| Label |
The $y$-component of velocity of the second object |
| Units |
$\frac{m}{s}$ |
| Equation | $${v_{\text{y}2}}={v_{\text{y}1}}+{w_{2}}\,{L_{2}}\,\sin\left({θ_{2}}\right)$$ |
| Description |
|
| Source |
-- |
| RefBy |
Detailed derivation of the $y$-component of velocity:¶
At a given point in time, velocity is defined in DD:positionGDD $$\symbf{v}\text{(}t\text{)}=\frac{\,d\symbf{p}\text{(}t\text{)}}{\,dt}$$
We also know the vertical position that is defined in DD:positionYDD2 $${p_{\text{y}2}}={p_{\text{y}1}}-{L_{2}}\,\cos\left({θ_{2}}\right)$$
Applying this, $${v_{\text{y}2}}=-\left(\frac{\,d{p_{\text{y}1}}-{L_{2}}\,\cos\left({θ_{2}}\right)}{\,dt}\right)$$
Therefore, using the chain rule,
$${v_{\text{y}2}}={v_{\text{y}1}}+{w_{2}}\,{L_{2}}\,\sin\left({θ_{2}}\right)$$
| Refname | GD:accelerationX1 |
|---|---|
| Label |
The $x$-component of acceleration of the first object |
| Units |
$\frac{m}{s^2}$ |
| Equation | $${a_{\text{x}1}}=-{w_{1}}^{2}\,{L_{1}}\,\sin\left({θ_{1}}\right)+{α_{1}}\,{L_{1}}\,\cos\left({θ_{1}}\right)$$ |
| Description |
|
| Source |
-- |
| RefBy |
Detailed derivation of the $x$-component of acceleration:¶
Our acceleration is: $$\symbf{a}\text{(}t\text{)}=\frac{\,d\symbf{v}\text{(}t\text{)}}{\,dt}$$
Earlier, we found the horizontal velocity to be $${v_{\text{x}1}}={w_{1}}\,{L_{1}}\,\cos\left({θ_{1}}\right)$$
Applying this to our equation for acceleration $${a_{\text{x}1}}=\frac{\,d{w_{1}}\,{L_{1}}\,\cos\left({θ_{1}}\right)}{\,dt}$$
By the product and chain rules, we find $${a_{\text{x}1}}=\frac{\,d{w_{1}}}{\,dt}\,{L_{1}}\,\cos\left({θ_{1}}\right)-{w_{1}}\,{L_{1}}\,\sin\left({θ_{1}}\right)\,\frac{\,d{θ_{1}}}{\,dt}$$
Simplifying,
$${a_{\text{x}1}}=-{w_{1}}^{2}\,{L_{1}}\,\sin\left({θ_{1}}\right)+{α_{1}}\,{L_{1}}\,\cos\left({θ_{1}}\right)$$
| Refname | GD:accelerationY1 |
|---|---|
| Label |
The $y$-component of acceleration of the first object |
| Units |
$\frac{m}{s^2}$ |
| Equation | $${a_{\text{y}1}}={w_{1}}^{2}\,{L_{1}}\,\cos\left({θ_{1}}\right)+{α_{1}}\,{L_{1}}\,\sin\left({θ_{1}}\right)$$ |
| Description |
|
| Source |
-- |
| RefBy |
Detailed derivation of the $y$-component of acceleration:¶
Our acceleration is: $$\symbf{a}\text{(}t\text{)}=\frac{\,d\symbf{v}\text{(}t\text{)}}{\,dt}$$
Earlier, we found the vertical velocity to be $${v_{\text{y}1}}={w_{1}}\,{L_{1}}\,\sin\left({θ_{1}}\right)$$
Applying this to our equation for acceleration $${a_{\text{y}1}}=\frac{\,d{w_{1}}\,{L_{1}}\,\sin\left({θ_{1}}\right)}{\,dt}$$
By the product and chain rules, we find $${a_{\text{y}1}}=\frac{\,d{w_{1}}}{\,dt}\,{L_{1}}\,\sin\left({θ_{1}}\right)+{w_{1}}\,{L_{1}}\,\cos\left({θ_{1}}\right)\,\frac{\,d{θ_{1}}}{\,dt}$$
Simplifying,
$${a_{\text{y}1}}={w_{1}}^{2}\,{L_{1}}\,\cos\left({θ_{1}}\right)+{α_{1}}\,{L_{1}}\,\sin\left({θ_{1}}\right)$$
| Refname | GD:accelerationX2 |
|---|---|
| Label |
The $x$-component of acceleration of the second object |
| Units |
$\frac{m}{s^2}$ |
| Equation | $${a_{\text{x}2}}={a_{\text{x}1}}-{w_{2}}^{2}\,{L_{2}}\,\sin\left({θ_{2}}\right)+{α_{2}}\,{L_{2}}\,\cos\left({θ_{2}}\right)$$ |
| Description |
|
| Source |
-- |
| RefBy |
Detailed derivation of the $x$-component of acceleration:¶
Our acceleration is: $$\symbf{a}\text{(}t\text{)}=\frac{\,d\symbf{v}\text{(}t\text{)}}{\,dt}$$
Earlier, we found the horizontal velocity to be $${v_{\text{x}2}}={v_{\text{x}1}}+{w_{2}}\,{L_{2}}\,\cos\left({θ_{2}}\right)$$
Applying this to our equation for acceleration $${a_{\text{x}2}}=\frac{\,d{v_{\text{x}1}}+{w_{2}}\,{L_{2}}\,\cos\left({θ_{2}}\right)}{\,dt}$$
By the product and chain rules, we find
$${a_{\text{x}2}}={a_{\text{x}1}}-{w_{2}}^{2}\,{L_{2}}\,\sin\left({θ_{2}}\right)+{α_{2}}\,{L_{2}}\,\cos\left({θ_{2}}\right)$$
| Refname | GD:accelerationY2 |
|---|---|
| Label |
The $y$-component of acceleration of the second object |
| Units |
$\frac{m}{s^2}$ |
| Equation | $${a_{\text{y}2}}={a_{\text{y}1}}+{w_{2}}^{2}\,{L_{2}}\,\cos\left({θ_{2}}\right)+{α_{2}}\,{L_{2}}\,\sin\left({θ_{2}}\right)$$ |
| Description |
|
| Source |
-- |
| RefBy |
Detailed derivation of the $y$-component of acceleration:¶
Our acceleration is: $$\symbf{a}\text{(}t\text{)}=\frac{\,d\symbf{v}\text{(}t\text{)}}{\,dt}$$
Earlier, we found the horizontal velocity to be $${v_{\text{y}2}}={v_{\text{y}1}}+{w_{2}}\,{L_{2}}\,\sin\left({θ_{2}}\right)$$
Applying this to our equation for acceleration $${a_{\text{y}2}}=\frac{\,d{v_{\text{y}1}}+{w_{2}}\,{L_{2}}\,\sin\left({θ_{2}}\right)}{\,dt}$$
By the product and chain rules, we find
$${a_{\text{y}2}}={a_{\text{y}1}}+{w_{2}}^{2}\,{L_{2}}\,\cos\left({θ_{2}}\right)+{α_{2}}\,{L_{2}}\,\sin\left({θ_{2}}\right)$$
| Refname | GD:xForce1 |
|---|---|
| Label |
Horizontal force on the first object |
| Units |
$N$ |
| Equation | $$\symbf{F}=m \symbf{a}\text{(}t\text{)}=-{\symbf{T}_{1}}\,\sin\left({θ_{1}}\right)+{\symbf{T}_{2}}\,\sin\left({θ_{2}}\right)$$ |
| Description |
|
| Source |
-- |
| RefBy |
Detailed derivation of force on the first object:¶
$$\symbf{F}=m \symbf{a}\text{(}t\text{)}=-{\symbf{T}_{1}}\,\sin\left({θ_{1}}\right)+{\symbf{T}_{2}}\,\sin\left({θ_{2}}\right)$$
| Refname | GD:yForce1 |
|---|---|
| Label |
Vertical force on the first object |
| Units |
$N$ |
| Equation | $$\symbf{F}=m \symbf{a}\text{(}t\text{)}={\symbf{T}_{1}}\,\cos\left({θ_{1}}\right)-{\symbf{T}_{2}}\,\cos\left({θ_{2}}\right)-{m_{1}}\,\symbf{g}$$ |
| Description |
|
| Source |
-- |
| RefBy |
Detailed derivation of force on the first object:¶
$$\symbf{F}=m \symbf{a}\text{(}t\text{)}={\symbf{T}_{1}}\,\cos\left({θ_{1}}\right)-{\symbf{T}_{2}}\,\cos\left({θ_{2}}\right)-{m_{1}}\,\symbf{g}$$
| Refname | GD:xForce2 |
|---|---|
| Label |
Horizontal force on the second object |
| Units |
$N$ |
| Equation | $$\symbf{F}=m \symbf{a}\text{(}t\text{)}=-{\symbf{T}_{2}}\,\sin\left({θ_{2}}\right)$$ |
| Description |
|
| Source |
-- |
| RefBy |
Detailed derivation of force on the second object:¶
$$\symbf{F}=m \symbf{a}\text{(}t\text{)}=-{\symbf{T}_{2}}\,\sin\left({θ_{2}}\right)$$
| Refname | GD:yForce2 |
|---|---|
| Label |
Vertical force on the second object |
| Units |
$N$ |
| Equation | $$\symbf{F}=m \symbf{a}\text{(}t\text{)}={\symbf{T}_{2}}\,\cos\left({θ_{2}}\right)-{m_{2}}\,\symbf{g}$$ |
| Description |
|
| Source |
-- |
| RefBy |
Detailed derivation of force on the second object:¶
$$\symbf{F}=m \symbf{a}\text{(}t\text{)}={\symbf{T}_{2}}\,\cos\left({θ_{2}}\right)-{m_{2}}\,\symbf{g}$$
Data Definitions¶
This section collects and defines all the data needed to build the instance models.
| Refname | DD:positionGDD |
|---|---|
| Label |
Velocity |
| Symbol |
$v(t)$ |
| Units |
$\frac{m}{s}$ |
| Equation | $$\symbf{v}\text{(}t\text{)}=\frac{\,d\symbf{p}\text{(}t\text{)}}{\,dt}$$ |
| Description |
|
| Source |
-- |
| RefBy |
GD:velocityY2, GD:velocityY1, GD:velocityX2, and GD:velocityX1 |
| Refname | DD:positionXDD1 |
|---|---|
| Label |
Horizontal position of the first object |
| Symbol |
$p_x1$ |
| Units |
$m$ |
| Equation | $${p_{\text{x}1}}={L_{1}}\,\sin\left({θ_{1}}\right)$$ |
| Description |
|
| Notes |
$p_x1$ is the horizontal position $p_x1$ is shown in Fig:dblpend. |
| Source |
-- |
| RefBy |
| Refname | DD:positionYDD1 |
|---|---|
| Label |
Vertical position of the first object |
| Symbol |
$p_y1$ |
| Units |
$m$ |
| Equation | $${p_{\text{y}1}}=-{L_{1}}\,\cos\left({θ_{1}}\right)$$ |
| Description |
|
| Notes |
$p_y1$ is the vertical position $p_y1$ is shown in Fig:dblpend. |
| Source |
-- |
| RefBy |
| Refname | DD:positionXDD2 |
|---|---|
| Label |
Horizontal position of the second object |
| Symbol |
$p_x2$ |
| Units |
$m$ |
| Equation | $${p_{\text{x}2}}={p_{\text{x}1}}+{L_{2}}\,\sin\left({θ_{2}}\right)$$ |
| Description |
|
| Notes |
$p_x2$ is the horizontal position $p_x2$ is shown in Fig:dblpend. |
| Source |
-- |
| RefBy |
| Refname | DD:positionYDD2 |
|---|---|
| Label |
Vertical position of the second object |
| Symbol |
$p_y2$ |
| Units |
$m$ |
| Equation | $${p_{\text{y}2}}={p_{\text{y}1}}-{L_{2}}\,\cos\left({θ_{2}}\right)$$ |
| Description |
|
| Notes |
$p_y2$ is the vertical position $p_y2$ is shown in Fig:dblpend. |
| Source |
-- |
| RefBy |
| Refname | DD:accelerationGDD |
|---|---|
| Label |
Acceleration |
| Symbol |
$a(t)$ |
| Units |
$\frac{m}{s^2}$ |
| Equation | $$\symbf{a}\text{(}t\text{)}=\frac{\,d\symbf{v}\text{(}t\text{)}}{\,dt}$$ |
| Description |
|
| Source |
-- |
| RefBy |
| Refname | DD:forceGDD |
|---|---|
| Label |
Force |
| Symbol |
$F$ |
| Units |
$N$ |
| Equation | $$\symbf{F}=m \symbf{a}\text{(}t\text{)}$$ |
| Description |
|
| Source |
-- |
| RefBy |
Instance Models¶
This section transforms the problem defined in the problem description into one which is expressed in mathematical terms. It uses concrete symbols defined in the data definitions to replace the abstract symbols in the models identified in theoretical models and general definitions.
| Refname | IM:calOfAngle1 |
|---|---|
| Label |
Calculation of angle of first rod |
| Input |
$L_1$, $L_2$, $m_1$, $m_2$, $θ_1$, $θ_2$ |
| Output |
$θ_1$ |
| Input Constraints | $${L_{1}}\gt{}0$$ $${L_{2}}\gt{}0$$ $${m_{1}}\gt{}0$$ $${m_{2}}\gt{}0$$ |
| Output Constraints | |
| Equation | $${α_{1}}\left({θ_{1}},{θ_{2}},{w_{1}},{w_{2}}\right)=\frac{-g\,\left(2\,{m_{1}}+{m_{2}}\right)\,\sin\left({θ_{1}}\right)-{m_{2}}\,g\,\sin\left({θ_{1}}-2\,{θ_{2}}\right)-2\,\sin\left({θ_{1}}-{θ_{2}}\right)\,{m_{2}}\,\left({w_{2}}^{2}\,{L_{2}}+{w_{1}}^{2}\,{L_{1}}\,\cos\left({θ_{1}}-{θ_{2}}\right)\right)}{{L_{1}}\,\left(2\,{m_{1}}+{m_{2}}-{m_{2}}\,\cos\left(2\,{θ_{1}}-2\,{θ_{2}}\right)\right)}$$ |
| Description |
|
| Notes |
$θ_1$ is calculated by solving the ODE here together with the initial conditions and IM:calOfAngle2. |
| Source |
-- |
| RefBy |
IM:calOfAngle2, FR:Output-Values, and FR:Calculate-Angle-Of-Rod |
| Refname | IM:calOfAngle2 |
|---|---|
| Label |
Calculation of angle of second rod |
| Input |
$L_1$, $L_2$, $m_1$, $m_2$, $θ_1$, $θ_2$ |
| Output |
$θ_2$ |
| Input Constraints | $${L_{1}}\gt{}0$$ $${L_{2}}\gt{}0$$ $${m_{1}}\gt{}0$$ $${m_{2}}\gt{}0$$ |
| Output Constraints | |
| Equation | $${α_{2}}\left({θ_{1}},{θ_{2}},{w_{1}},{w_{2}}\right)=\frac{2\,\sin\left({θ_{1}}-{θ_{2}}\right)\,\left({w_{1}}^{2}\,{L_{1}}\,\left({m_{1}}+{m_{2}}\right)+g\,\left({m_{1}}+{m_{2}}\right)\,\cos\left({θ_{1}}\right)+{w_{2}}^{2}\,{L_{2}}\,{m_{2}}\,\cos\left({θ_{1}}-{θ_{2}}\right)\right)}{{L_{2}}\,\left(2\,{m_{1}}+{m_{2}}-{m_{2}}\,\cos\left(2\,{θ_{1}}-2\,{θ_{2}}\right)\right)}$$ |
| Description |
|
| Notes |
$θ_2$ is calculated by solving the ODE here together with the initial conditions and IM:calOfAngle1. |
| Source |
-- |
| RefBy |
IM:calOfAngle2, IM:calOfAngle1, FR:Output-Values, and FR:Calculate-Angle-Of-Rod |
Detailed derivation of angle of the second rod:¶
By solving equations GD:xForce2 and GD:yForce2 for $T_2sin(θ_2)$ and $T_2cos(θ_2)$ and then substituting into equation GD:xForce1 and GD:yForce1 , we can get equations 1 and 2: $${m_{1}}\,{a_{\text{x}1}}=-{\symbf{T}_{1}}\,\sin\left({θ_{1}}\right)-{m_{2}}\,{a_{\text{x}2}}$$
$${m_{1}}\,{a_{\text{y}1}}={\symbf{T}_{1}}\,\cos\left({θ_{1}}\right)-{m_{2}}\,{a_{\text{y}2}}-{m_{2}}\,g-{m_{1}}\,g$$
Multiply the equation 1 by $cos(θ_1)$ and the equation 2 by $sin(θ_1)$ and rearrange to get: $${\symbf{T}_{1}}\,\sin\left({θ_{1}}\right)\,\cos\left({θ_{1}}\right)=-\cos\left({θ_{1}}\right)\,\left({m_{1}}\,{a_{\text{x}1}}+{m_{2}}\,{a_{\text{x}2}}\right)$$
$${\symbf{T}_{1}}\,\sin\left({θ_{1}}\right)\,\cos\left({θ_{1}}\right)=\sin\left({θ_{1}}\right)\,\left({m_{1}}\,{a_{\text{y}1}}+{m_{2}}\,{a_{\text{y}2}}+{m_{2}}\,g+{m_{1}}\,g\right)$$
This leads to the equation 3 $$\sin\left({θ_{1}}\right)\,\left({m_{1}}\,{a_{\text{y}1}}+{m_{2}}\,{a_{\text{y}2}}+{m_{2}}\,g+{m_{1}}\,g\right)=-\cos\left({θ_{1}}\right)\,\left({m_{1}}\,{a_{\text{x}1}}+{m_{2}}\,{a_{\text{x}2}}\right)$$
Next, multiply equation GD:xForce2 by $cos(θ_2)$ and equation GD:yForce2 by $sin(θ_2)$ and rearrange to get: $${\symbf{T}_{2}}\,\sin\left({θ_{2}}\right)\,\cos\left({θ_{2}}\right)=-\cos\left({θ_{2}}\right)\,{m_{2}}\,{a_{\text{x}2}}$$
$${\symbf{T}_{1}}\,\sin\left({θ_{2}}\right)\,\cos\left({θ_{2}}\right)=\sin\left({θ_{2}}\right)\,\left({m_{2}}\,{a_{\text{y}2}}+{m_{2}}\,g\right)$$
which leads to equation 4 $$\sin\left({θ_{2}}\right)\,\left({m_{2}}\,{a_{\text{y}2}}+{m_{2}}\,g\right)=-\cos\left({θ_{2}}\right)\,{m_{2}}\,{a_{\text{x}2}}$$
By giving equations GD:accelerationX1 and GD:accelerationX2 and GD:accelerationY1 and GD:accelerationY2 plus additional two equations, 3 and 4, we can get IM:calOfAngle1 and IM:calOfAngle2 via a computer algebra program:
Data Constraints¶
The Data Constraints Table shows the data constraints on the input variables. The column for physical constraints gives the physical limitations on the range of values that can be taken by the variable. The uncertainty column provides an estimate of the confidence with which the physical quantities can be measured. This information would be part of the input if one were performing an uncertainty quantification exercise. The constraints are conservative to give the user of the model the flexibility to experiment with unusual situations. The column of typical values is intended to provide a feel for a common scenario.
| Var | Physical Constraints | Typical Value | Uncert. |
|---|---|---|---|
| $L_1$ | $L_1 > 0$ | $1.0$ $m$ | 10$%$ |
| $L_2$ | $L_2 > 0$ | $1.0$ $m$ | 10$%$ |
| $m_1$ | $m_1 > 0$ | $0.5$ $kg$ | 10$%$ |
| $m_2$ | $m_2 > 0$ | $0.5$ $kg$ | 10$%$ |
Properties of a Correct Solution¶
The Data Constraints Table shows the data constraints on the output variables. The column for physical constraints gives the physical limitations on the range of values that can be taken by the variable.
| Var | Physical Constraints |
|---|---|
| $θ_1$ | $θ_1 > 0$ |
| $θ_2$ | $θ_2 > 0$ |
Requirements¶
This section provides the functional requirements, the tasks and behaviours that the software is expected to complete, and the non-functional requirements, the qualities that the software is expected to exhibit.
Functional Requirements¶
This section provides the functional requirements, the tasks and behaviours that the software is expected to complete.
| Symbol | Description | Units |
|---|---|---|
| $L_1$ | Length of the first rod | $m$ |
| $L_2$ | Length of the second rod | $m$ |
| $m_1$ | Mass of the first object | $kg$ |
| $m_2$ | Mass of the second object | $kg$ |
Non-Functional Requirements¶
This section provides the non-functional requirements, the qualities that the software is expected to exhibit.
Traceability Matrices and Graphs¶
The purpose of the traceability matrices is to provide easy references on what has to be additionally modified if a certain component is changed. Every time a component is changed, the items in the column of that component that are marked with an "X" should be modified as well. Tab:TraceMatAvsA shows the dependencies of the assumptions on each other. Tab:TraceMatAvsAll shows the dependencies of the data definitions, theoretical models, general definitions, instance models, requirements, likely changes, and unlikely changes on the assumptions. Tab:TraceMatRefvsRef shows the dependencies of the data definitions, theoretical models, general definitions, and instance models on each other. Tab:TraceMatAllvsR shows the dependencies of the requirements and goal statements on the data definitions, theoretical models, general definitions, and instance models.
| A:twoDMotion | A:cartSys | A:cartSysR | A:yAxisDir | |
|---|---|---|---|---|
| A:twoDMotion | ||||
| A:cartSys | ||||
| A:cartSysR | ||||
| A:yAxisDir |
The purpose of the traceability graphs is also to provide easy references on what has to be additionally modified if a certain component is changed. The arrows in the graphs represent dependencies. The component at the tail of an arrow is depended on by the component at the head of that arrow. Therefore, if a component is changed, the components that it points to should also be changed. Fig:TraceGraphAvsA shows the dependencies of assumptions on each other. Fig:TraceGraphAvsAll shows the dependencies of data definitions, theoretical models, general definitions, instance models, requirements, likely changes, and unlikely changes on the assumptions. Fig:TraceGraphRefvsRef shows the dependencies of data definitions, theoretical models, general definitions, and instance models on each other. Fig:TraceGraphAllvsR shows the dependencies of requirements and goal statements on the data definitions, theoretical models, general definitions, and instance models. Fig:TraceGraphAllvsAll shows the dependencies of dependencies of assumptions, models, definitions, requirements, goals, and changes with each other.





For convenience, the following graphs can be found at the links below:
- <a href="../../../../traceygraphs/dblpend/avsa.svg">TraceGraphAvsA
- <a href="../../../../traceygraphs/dblpend/avsall.svg">TraceGraphAvsAll
- <a href="../../../../traceygraphs/dblpend/refvsref.svg">TraceGraphRefvsRef
- <a href="../../../../traceygraphs/dblpend/allvsr.svg">TraceGraphAllvsR
- <a href="../../../../traceygraphs/dblpend/allvsall.svg">TraceGraphAllvsAll
Values of Auxiliary Constants¶
There are no auxiliary constants.
References¶
[1]: Hibbeler, R. C. Engineering Mechanics: Dynamics. Pearson Prentice Hall, 2004. Print. [2]: Koothoor, Nirmitha. A Document Driven Approach to Certifying Scientific Computing Software. McMaster University, Hamilton, ON, Canada: 2013. Print. [3]: Parnas, David L. and Clements, P. C. "A rational design process: How and why to fake it." IEEE Transactions on Software Engineering, vol. 12, no. 2, Washington, USA: February, 1986. pp. 251–257. Print. [4]: Smith, W. Spencer and Koothoor, Nirmitha. "A Document-Driven Method for Certifying Scientific Computing Software for Use in Nuclear Safety Analysis." Nuclear Engineering and Technology, vol. 48, no. 2, April, 2016. http://www.sciencedirect.com/science/article/pii/S1738573315002582. pp. 404–418. [5]: Smith, W. Spencer and Lai, Lei. "A new requirements template for scientific computing." Proceedings of the First International Workshop on Situational Requirements Engineering Processes - Methods, Techniques and Tools to Support Situation-Specific Requirements Engineering Processes, SREP'05. Edited by PJ Agerfalk, N. Kraiem, and J. Ralyte, Paris, France: 2005. pp. 107–121. In conjunction with 13th IEEE International Requirements Engineering Conference, [6]: Smith, W. Spencer, Lai, Lei, and Khedri, Ridha. "Requirements Analysis for Engineering Computation: A Systematic Approach for Improving Software Reliability." Reliable Computing, Special Issue on Reliable Engineering Computation, vol. 13, no. 1, February, 2007. https://doi.org/10.1007/s11155-006-9020-7. pp. 83–107. [7]: Wikipedia Contributors. Acceleration. June, 2019. https://en.wikipedia.org/wiki/Acceleration. [8]: Wikipedia Contributors. Cartesian coordinate system. June, 2019. https://en.wikipedia.org/wiki/Cartesian_coordinate_system. [9]: Wikipedia Contributors. Velocity. June, 2019. https://en.wikipedia.org/wiki/Velocity.